(18年笔记)基于值函数的学习
📅 发表于 2018/04/21
🔄 更新于 2018/04/21
👁️ -- 次访问
📝 0 字
⏳ 0 分钟
强化学习
#值函数
#时序差分
#SARSA
#Q学习
#Q网络
#DQN
#蒙特卡罗
#动态规划
#策略迭代
#值迭代
值函数(
1. 穷举策略法 (无用)
2. 迭代优化策略法 (重点)
核心步骤
动态规划、 蒙特卡罗 等方法例子
不断变大:1. 动态规划思想
状态转移概率奖励2. 两种方法
策略迭代算法
均等初始化策略, 贝尔曼方程迭代计算V函数(均值)值迭代算法
均0初始化V函数,贝尔曼最优方程迭代计算V函数(最大a)直到V函数收敛,再计算Q函数,依Q更新策略3. 缺点
核心思想
策略评估和策略改进 2个步骤来完成1次更新。贝尔曼方程(所有a求期望)来算出该策略下各状态的价值函数 更新策略关键步骤
贝尔曼方程迭代计算该策略各状态s的价值函数 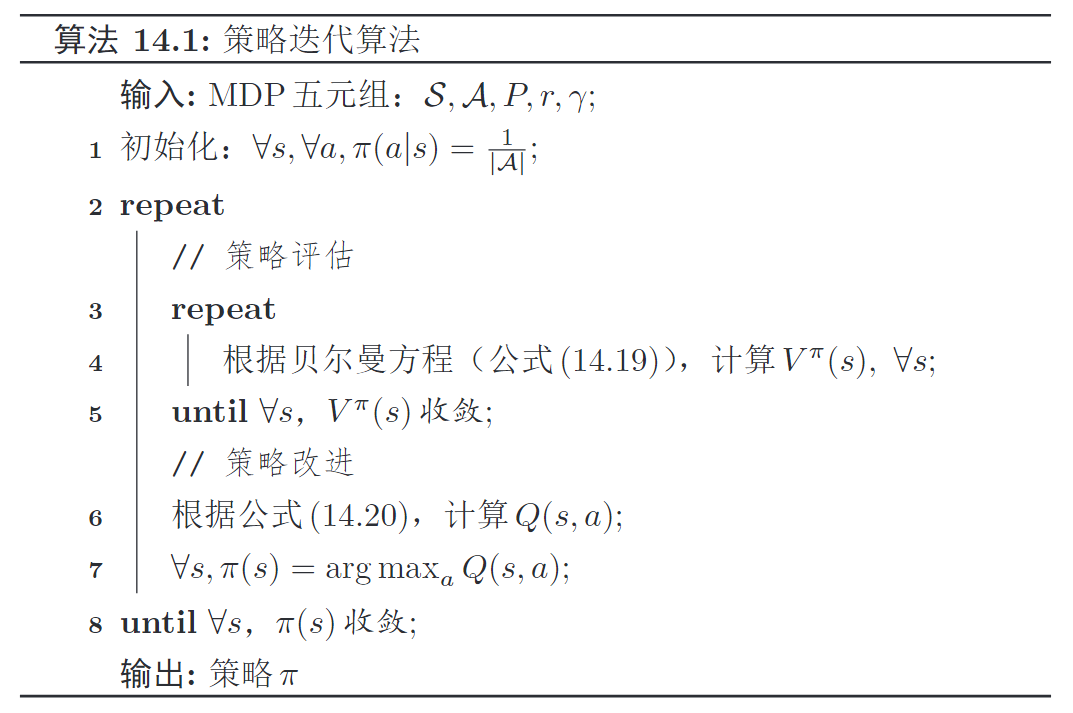
核心思想
贝尔曼最优方程,直接迭代更新直到其收敛,收敛后再算收敛时的值函数就是最优值函数,对应的策略 最优的策略关键步骤
无需策略,使用贝尔曼最优方程迭代计算直到其收敛。每次迭代,选择最大化当前价值的动作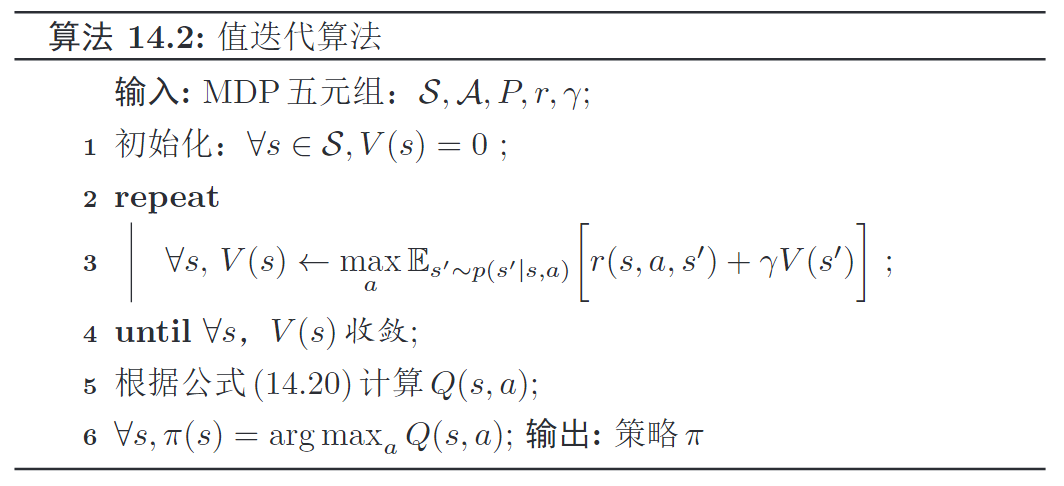
模型无关的强化学习
1. 背景
采集一些样本,根据样本期望来估计Q函数,求解最优策略模型未知,不知通过采样来计算2. 方法步骤
采集N个样本/轨迹,得到轨迹总回报利用轨迹总回报去估计 增量计算,不用每次计算平均值。改进策略 贪心法 鼓励探索和利用。采集样本、估计Q、改进策略,直到收敛3. 缺点
依赖每条轨迹的真实回报 需每个轨迹完成以后(回合结束),才能算出真实回报,再利用回报去更新价值函数。学习效率较低,不适用于长序列任务。背景
增接迭代计算回报(Q值)
第N次后的平均(Q值) = 第N-1次后的平均(Q值) + 第N次的1个增量增量(蒙特卡洛误差) = 轨迹真实回报 - 期望回报优点
每采样一个新轨迹就可以更新无需拿到所有轨迹的回报后才计算Q值,而为增量迭代计算1. 利用和探索
应覆盖所有状态和动作,以找到更好的策略少数情况下随机选择动作,鼓励对环境进行探索没有探索,只对环境进行利用 2. 同策略和异策略
同策略(on-policy) (普通MC)
行为(采样)策略,和评估价值的目标(改进)策略,相同,都是异策略(off-policy)
不同。我们希望:行为策略能尽可能探索环境,目标策略直接利用已有经验选取最佳策略。
3. 重要性采样
思想:通过在一个分布上采样,来估计另一个分布下的期望值。
RL:
生成数据,来估计策略价值函数,实现off-policy重要性采样权重,弥补矫正2个策略的差异一个策略的数据来估计另一个策略的价值函数重要性采样权重
时序差分学习=蒙特卡罗+动态规划,无需知道完整轨迹就能对策略进行评估。蒙特卡罗增量计算价值函数: 贝尔曼估计轨迹回报:效率低,状态动作数量多,难以计算效率低,需拿到完整轨迹才能对策略进行评估和更新蒙特卡罗的改进,引入动态规划来提高效率时序差分学习(temporal-difference learning)结合了动态规划和 蒙特卡罗方法。
1. 改进蒙特卡罗 增量计算
第N次后的Q值 = 第N-1次后的Q值 + 1个增量增量是第N条轨迹实际回报和预测回报的误差, 每条轨迹的真实回报 2. 利用贝尔曼估计轨迹回报
估计完整轨迹回报 下一步状态动作得到奖励即可估计轨迹回报当前当前轨迹未来总回报 3. 总结
贝尔曼估计总回报(马尔可夫性,动态规划)增量更新值函数(蒙特卡罗)1. 两种算法
2. 蒙特卡罗方法和时序差分方法比较
需完整路径才能知道总回报,不依赖马尔可夫性质只需一步就能知道总回报,依赖于马尔可夫性质SARASState Action Reward State Action,一种同策略的时序差分学习算法。
1. 核心思想
蒙特卡罗增量计算Q函数,其中轨迹回报 用贝尔曼估计来计算⭐
不断优化Q函数,减少实际值和预期值的差距,通过下面3项来更新
当前状态动作:
奖励:
下一步状态动作:
2. 核心推导
增量计算价值函数 贝尔曼方程估计轨迹回报 Q函数更新方程 ⭐增量计算Q函数,其中轨迹回报 用贝尔曼估计来计算⭐3. SARSA 算法步骤
随机初始化策略不断迭代直到收敛,进行以下迭代执行动作奖励新状态新状态依概率选择新动作更新Q函数:更新策略状态前进: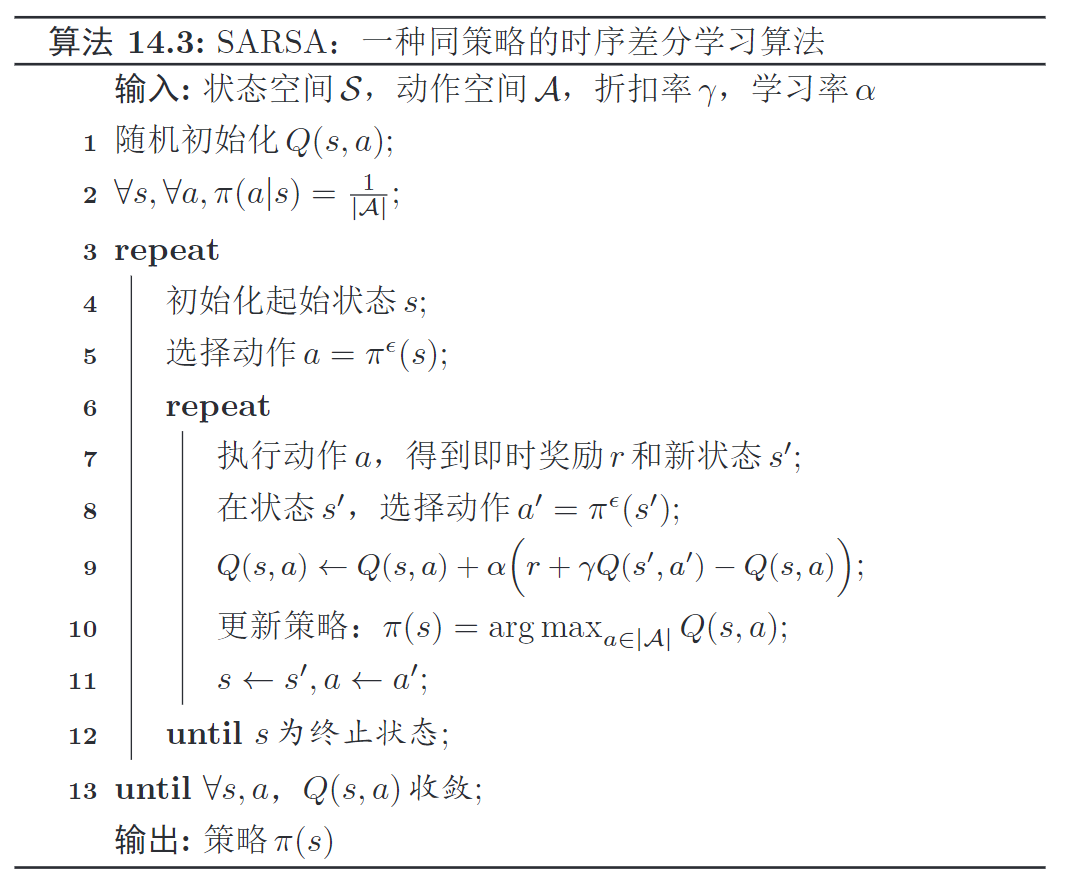
核心思想
不通过直接选择最优的Q函数更新后的Q函数是关于异策略的TD算法核心推导
直接选择最大的Q函数,不用依概率选择a对应的Q核心流程
执行动作奖励新状态新状态不依概率选择新动作 ,而是直接选择最优的Q函数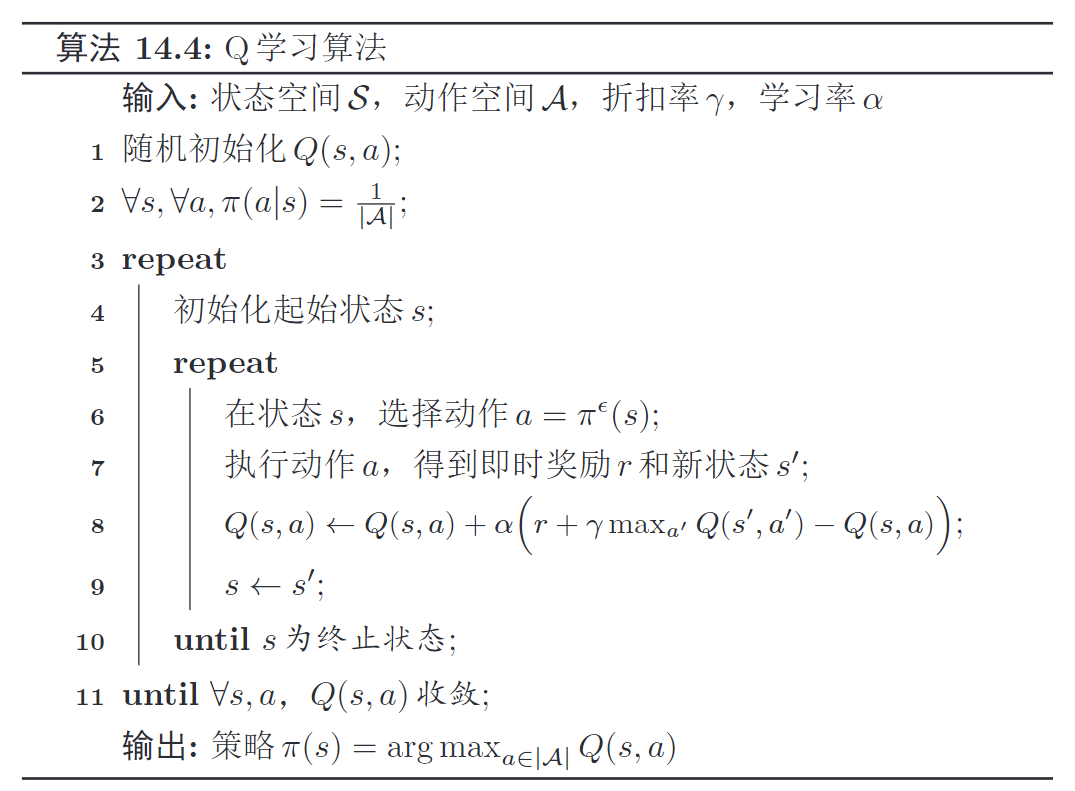
1. 背景
连续的状态动作空间里计算值函数2. 核心思想
神经网络参数近似逼近值函数向量表示。平均总回报贝尔曼方程估计的轨迹回报贝尔曼最优方程估计的轨迹回报3. Q网络的目标函数(以Q学习为例)
1. 背景
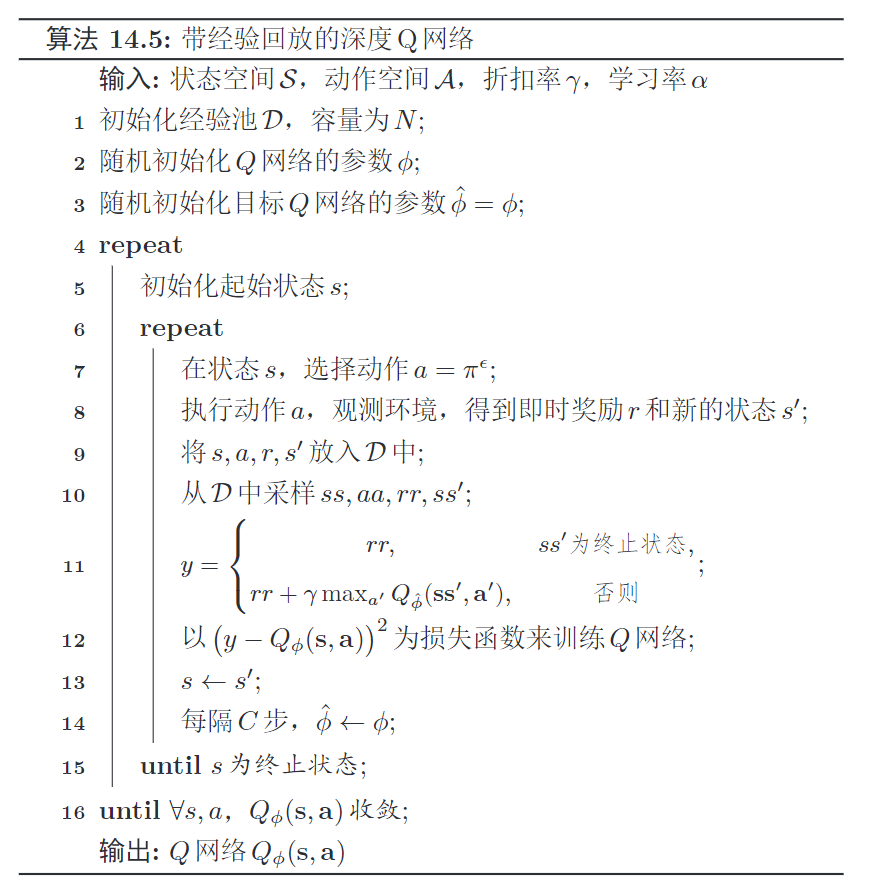
参数学习的目标依赖于参数本身。label本身也包含参数2. DQN(Deep Q Networks)
目标网络冻结:在一个时间段内,固定目标中的参数经验回放: 3. DQN的训练过程
初始化经验池 Q网络参数目标Q网络参数
初始化
采样动作状态加入经验池
选择执行动作从采样一条数据,
计算实际目标值
计算损失函数,梯度下降法去训练Q网络状态前进
更新目标Q网络的参数 每隔C步更新:
已知模型。利用贝尔曼方程(算均值)迭代计算出
已知模型。利用贝尔曼最优方程迭代算出
未知模型。从
无需知道完整轨迹就能对策略进行评估。
时序差分学习=动态规划-贝尔曼估计
贝尔曼估计轨迹总回报
增量计算
同策略的时序差分算法,是Q学习的改进。
1、当前状态
2、执行动作
4、依概率选择新动作
5、更新Q函数
6、更新状态和动作:
1、当前状态
2、执行动作
3、不依概率选择新动作,而是直接选择最大的值函数
4、更新Q函数
5、更新状态:
使用神经网络
深度Q网络:
生成新数据加入经验池
1、状态
2、执行动作
3、
采经验池中采样一条数据计算
1、从
2、计算实际目标值
3、损失函数如下,梯度下降法去训练Q网络
状态前进
更新目标Q网络的参数
每隔C步更新: