分布式并行策略
📅 发表于 2025/07/18
🔄 更新于 2025/07/18
👁️ -- 次访问
📝 0 字
⏳ 0 分钟
infra
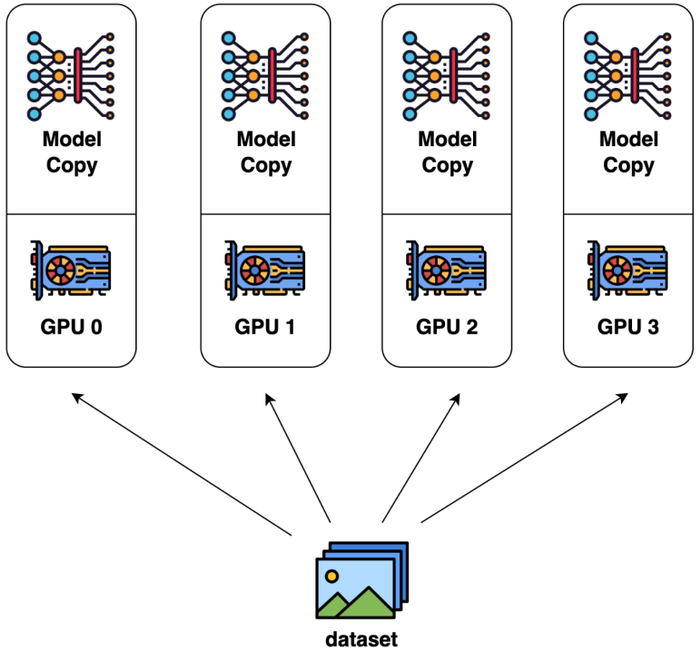
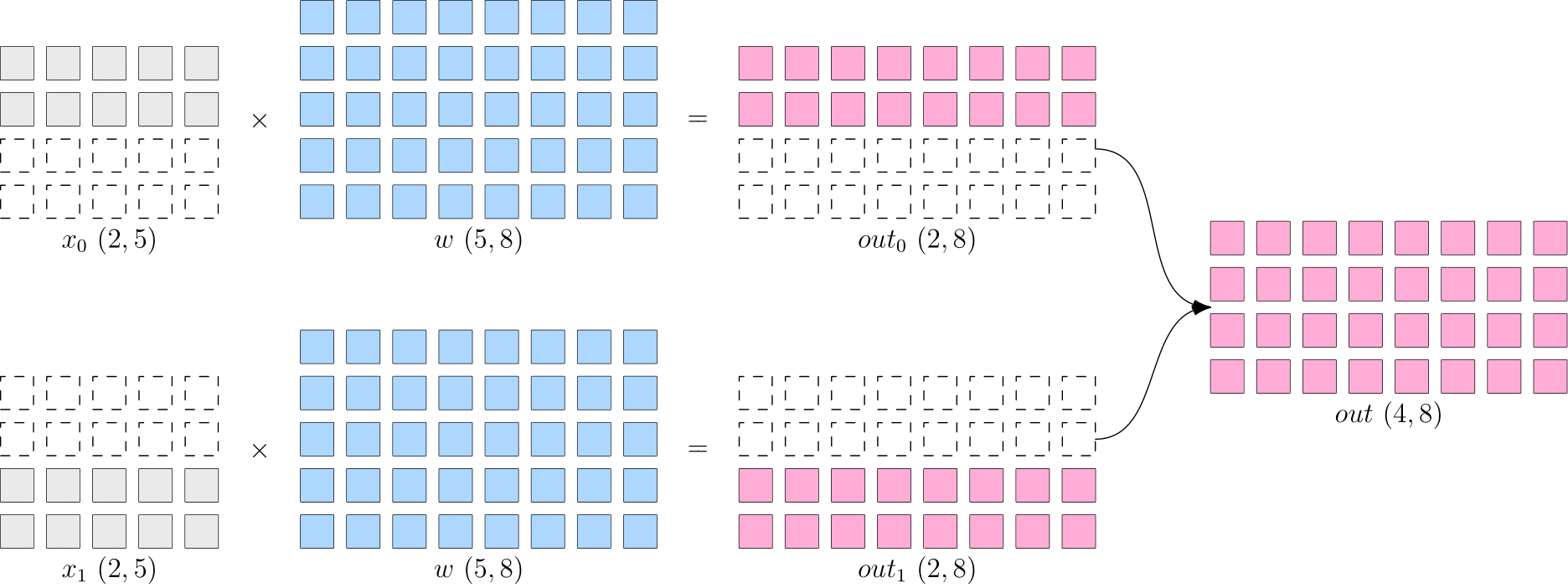
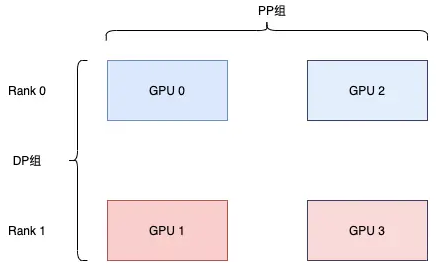
#data parrallel
#pipeline pararrlel
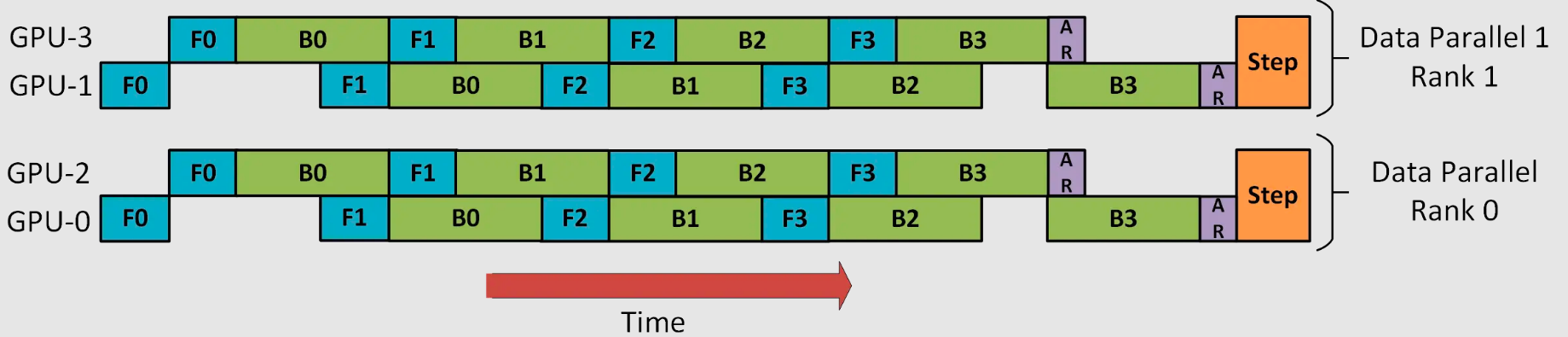
#F-then-B
#1F1B
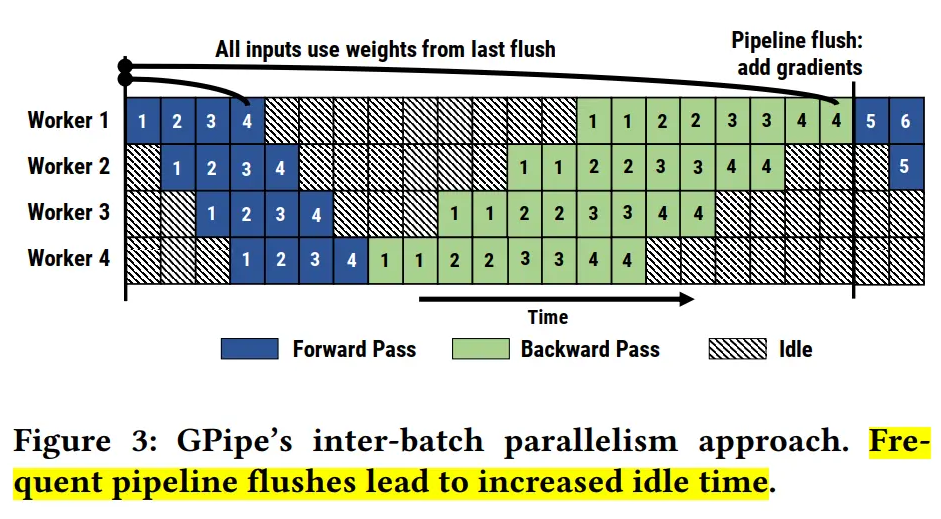
#Gpipe
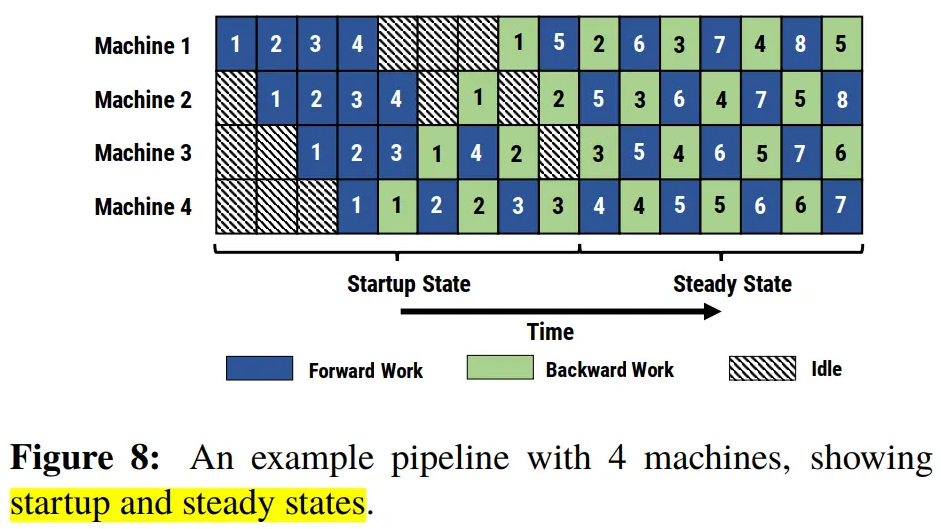
#PipeDream
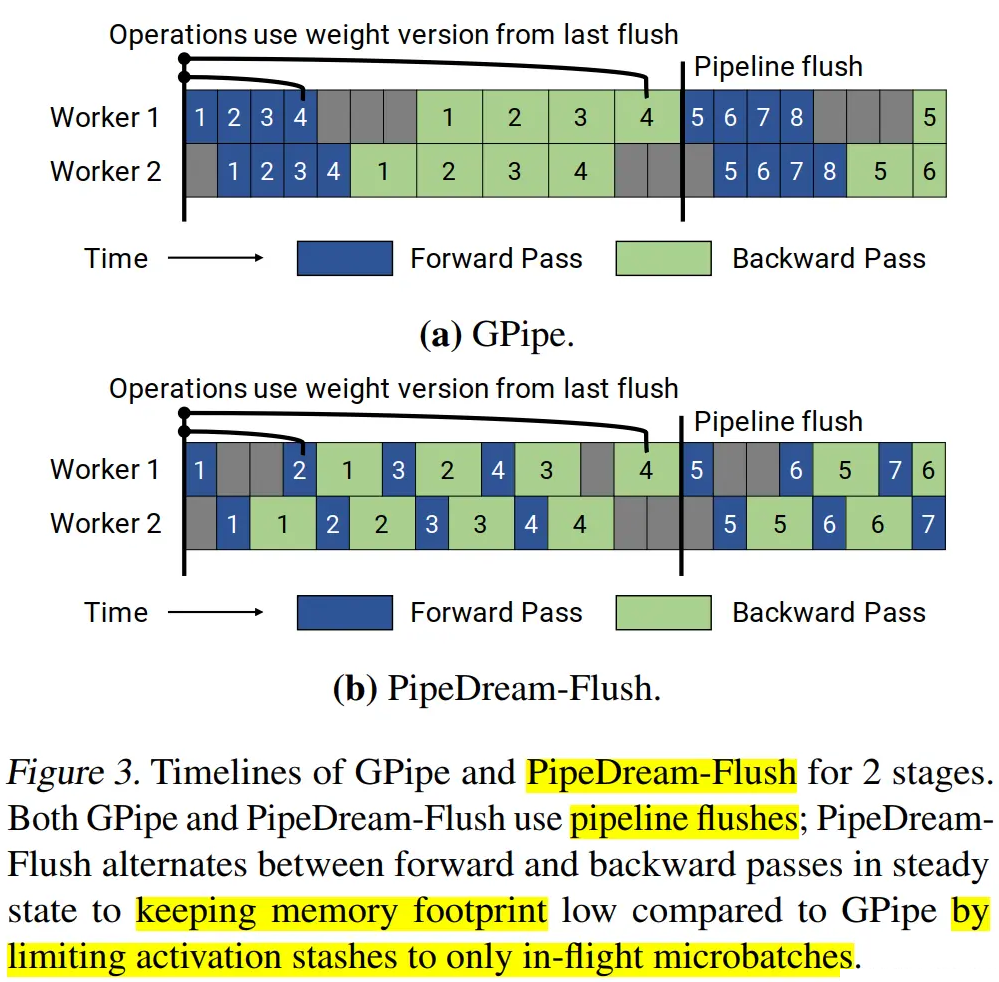
#PipeDream-Flush
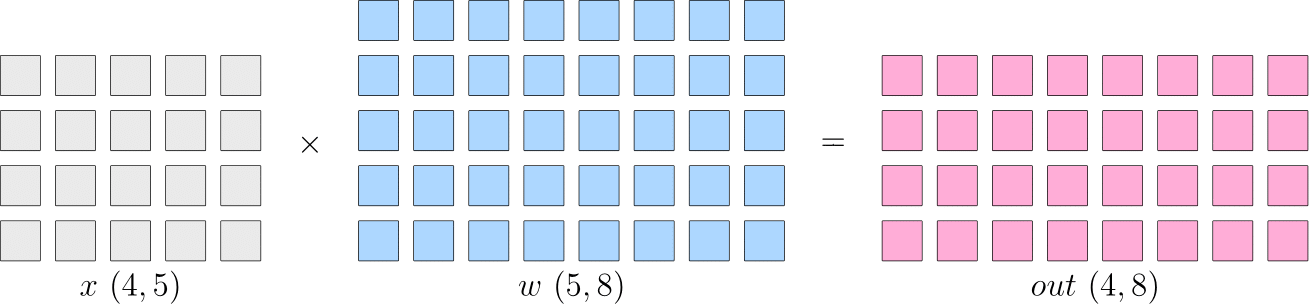
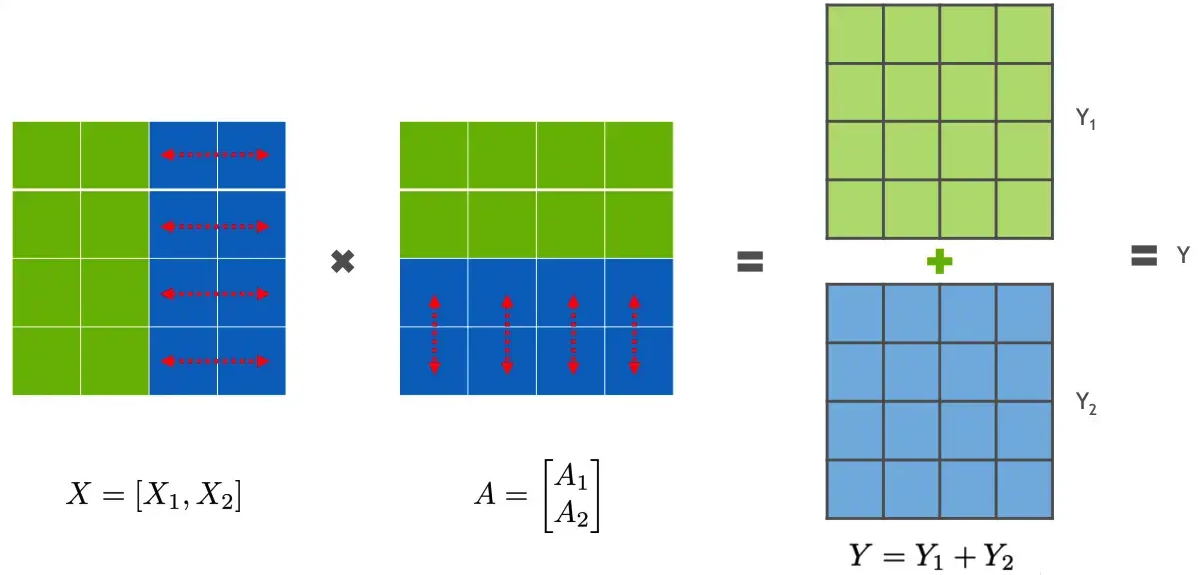
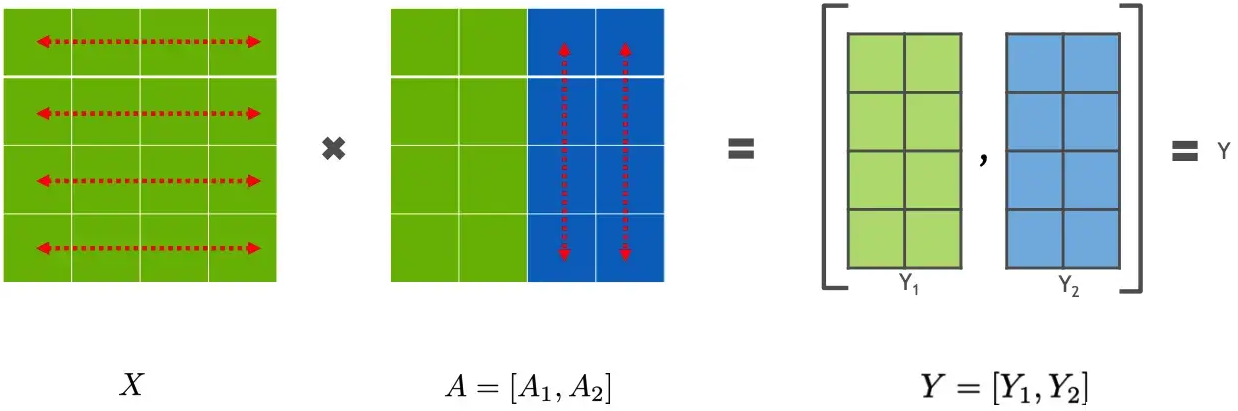
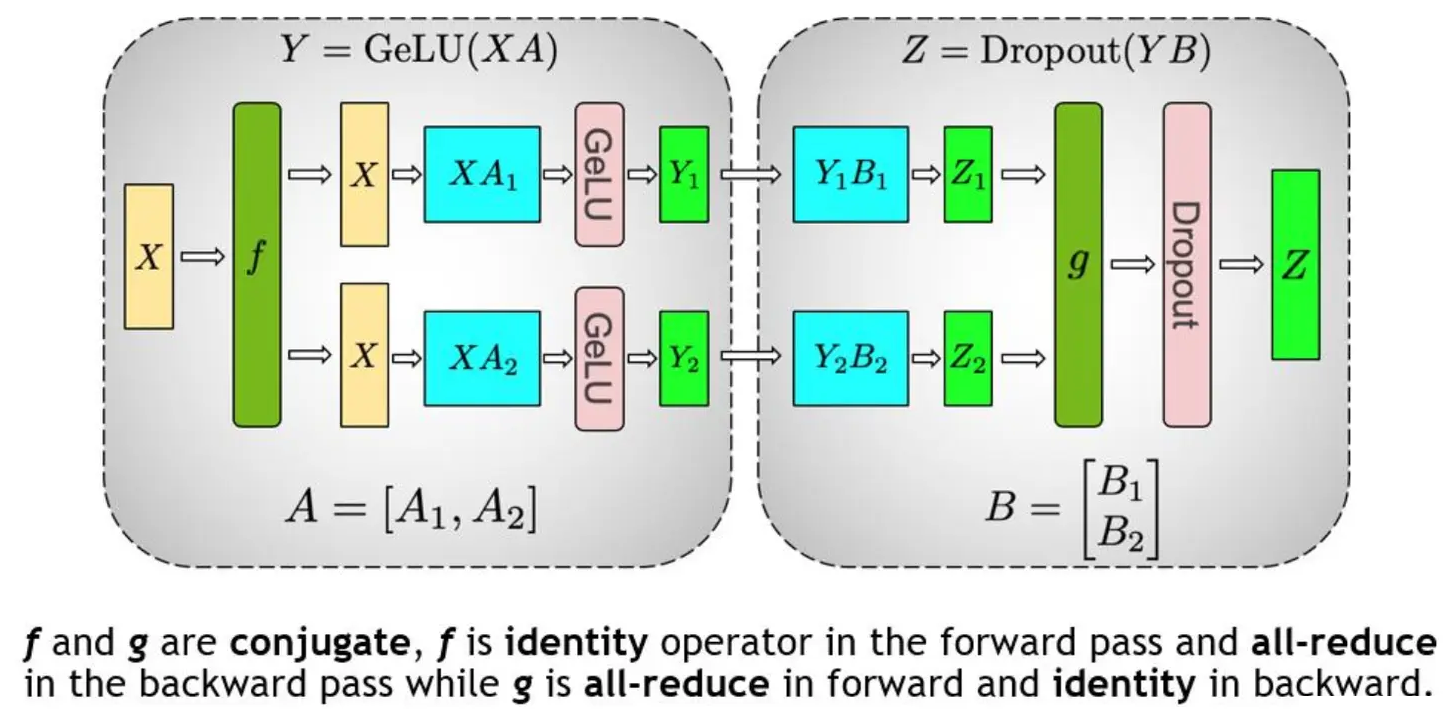
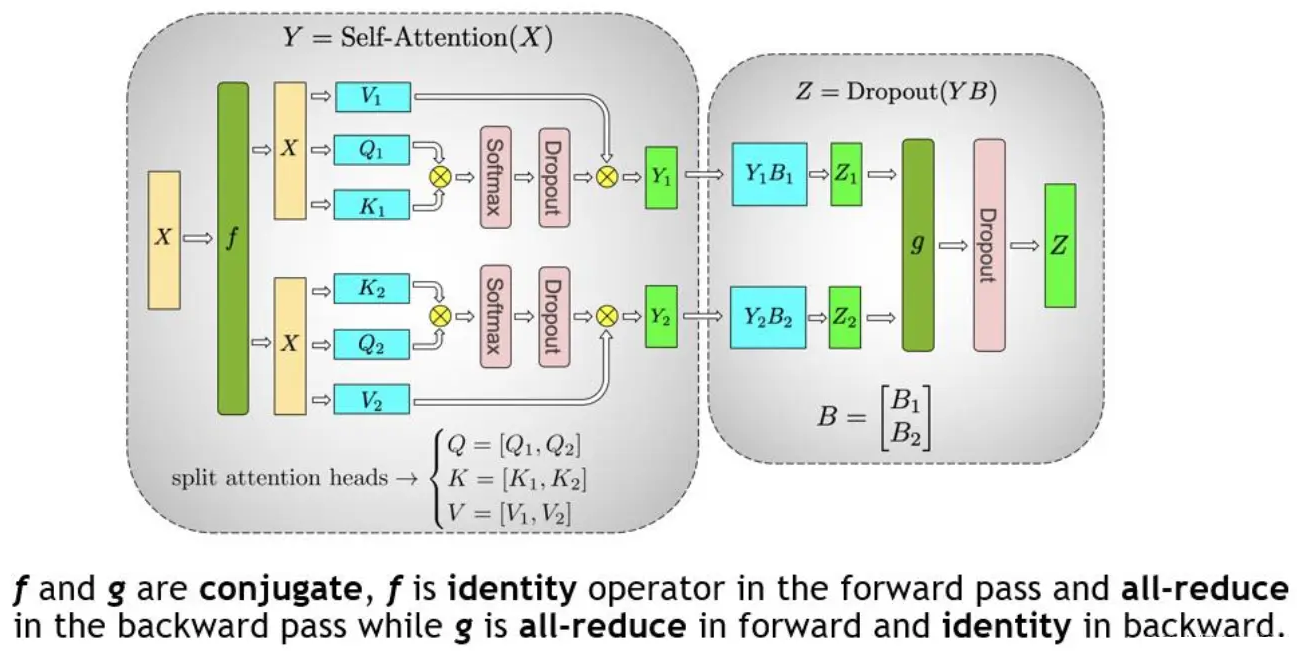
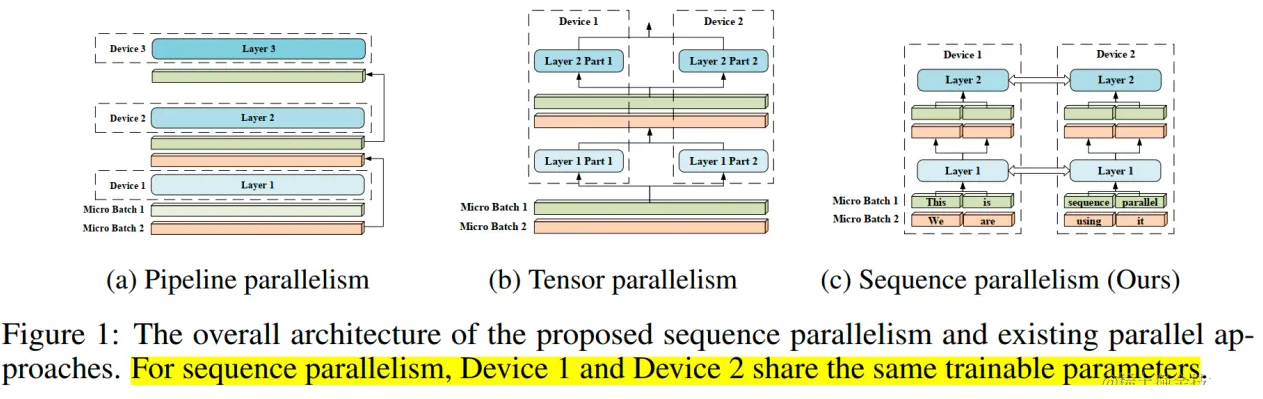
#Tensor Parrallel
#行并行
#列并行
#1D Parralel
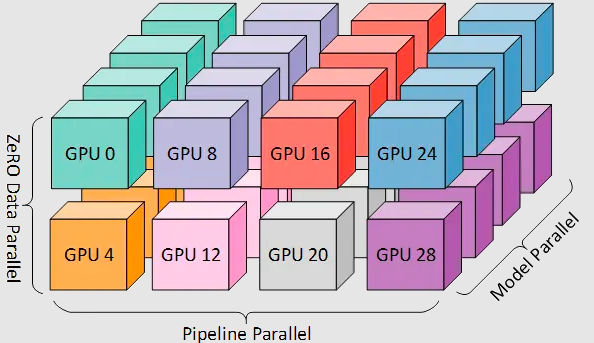
#多维并行
#3D并行
#序列并行
#混合并行
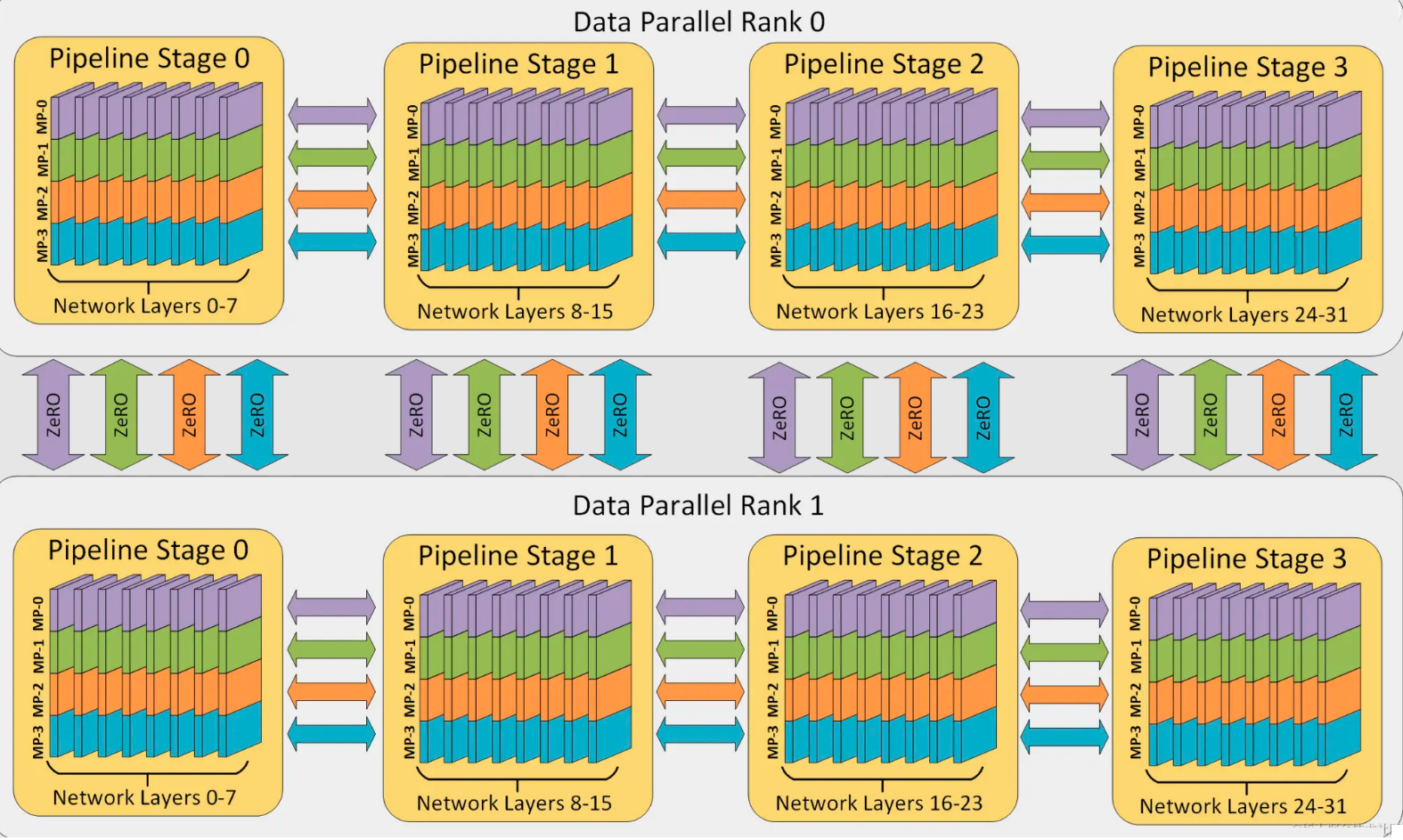
#DP+PP+TP
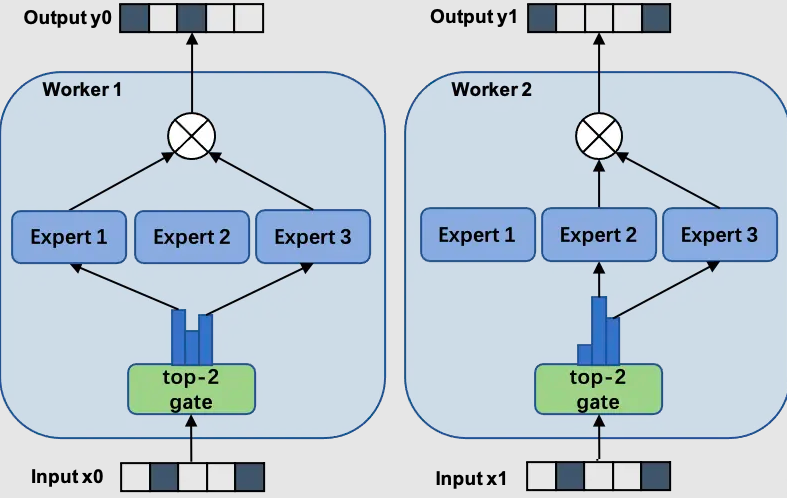
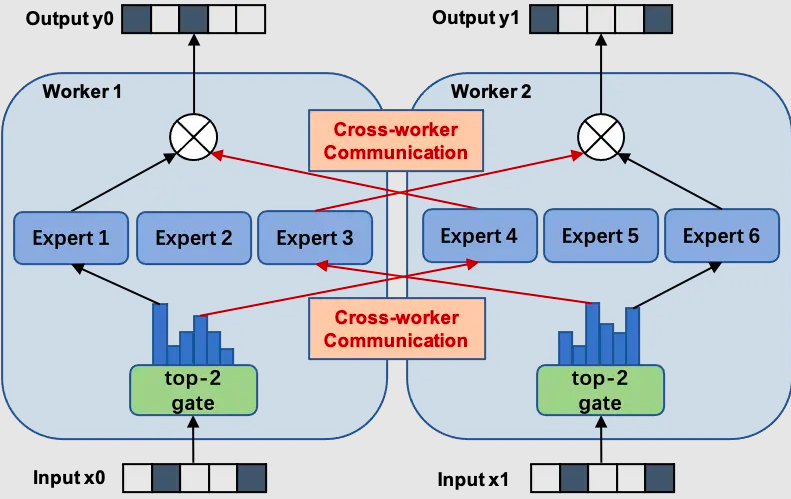
#MoE并行